
J Neuroeng Rehabil:三种足踝辅助装置的生物力学比较分析
2024-07-04 医路坦克 MedSci原创 发表于上海

本研究探讨了前臂拐杖、iWalk膝关节拐杖和踝足矫形器(AFO)三种类型的装置对单侧踝关节-足部行走时生物力学、代谢和主观参数的影响。
许多疾病都会影响足部和踝关节,包括糖尿病足溃疡跟腱断裂、足部和踝关节骨折和扭伤,以及踝关节置换或融合等外科手术。这些情况通常需要患者长时间避免下肢着地受力。例如,先前的研究报道踝关节骨折的周期约为4-8周,Charcot骨关节病的周期长达24周,糖尿病溃疡的周期长达38周。因此,通常要求使用辅助行走装置,以方便行走,同时避免患病腿承受不必要的重量。目前,拐杖是使患者在不负荷脚踝或足部的情况下行走的标准护理方法(图1a)。与轮椅相比,拐杖具有更大的活动能力和功能,有利于患者的健康和康复结果。然而,研究表明,拐杖步态往往比正常步态更慢,效率更低,并且限制了上肢的使用。与正常步态相比,拐杖改变了行走方式、关节运动学和地面反作用力(GRF)模式。

最近,有人提出了在步行时减轻足部和踝关节受力的替代装置。其中一种设备是iWalk膝拐(iWALKFree, Inc., Long Beach, CA, USA),它可以在小腿不负重的情况下实现免提步态。它的结构包括一个l形拐杖,使用者的小腿和大腿通过绑带固定在拐杖上。行走时,膝关节保持固定90度角,足部和踝关节不负重(图1b)。先前的研究表明,与传统的腋窝拐杖相比,使用iWalk行走可以减少上肢不适,患者感知到的劳累和偏好也更好。此外,先前的一项研究发现,与正常步态相比,使用iWalk行走只会导致未受影响肢体的生物力学步态模式发生轻微变化
另一种可以提供踝足卸荷的装置是踝足矫形器(AFO)。特别是,可以设计AFO,使grf通过周围的支架转移到小腿,同时保持受影响足的完全卸载。虽然大多数AFO是为专业诊所的患者定制设计和安装的,但ZeroG AFO(美国柯林斯堡骨科认证公司)声称是唯一一款提供足部和踝关节完全卸载的预制支架(图1c)。目前已有大量关于AFO的研究,这些AFO为肌肉无力、运动控制缺陷、痉挛和不稳定等疾病提供踝关节支持。此外,已经研究了提供部分负荷的支架和铸模对足底压力的影响。然而,据我们所知,卸载AFO的生物力学分析,如ZeroG,尚未发表。然而,我们预计卸载AFO可能比拐杖有利,原因有几个。首先,与膝盖拐杖类似,它们可以增加上肢的活动性。其次,它们允许受影响的近端腿(高于受伤的远端部分)的活动和负荷,这可能促进更对称和自然的行走模式,并降低代谢成本。最后,如上所述,它们有可能减轻对近端骨骼、关节和肌肉的不良影响。
本研究旨在研究与无辅助正常步态(NG)相比,使用三种不同的踝足卸荷装置行走的生物力学、代谢和主观结果。采用重复测量的受试者交叉研究设计,我们使用三种装置:前臂拐杖(CR)、iWalk (IW)和ZeroG (ZG),比较了每个参与者的NG与步态,如图1所示。实验由20名健康参与者在四种条件下以自行选择的速度行走。测量关节的三维运动学和质心(CoM)、GRFs和代谢成本,参与者通过问卷对稳定性、感知用力、舒适度、压力和疼痛进行主观评分。关节运动学和GRF的比较主要集中在承重肢体上,因为它允许直接比较两种情况,因为增加的GRF和承重腿的非典型运动学会导致过度劳损和继发性损伤,正如之前的研究在拐杖的情况下所显示的那样。
我们假设,与正常步态相比,所有装置都将显著改变步态参数。然而,我们希望ZeroG能带来更小的步态改变,因为它允许移动和卸载腿的膝盖和髋关节的负荷。此外,我们预计拐杖会导致GRF峰值和代谢成本的增加,与之前的研究类似,并且iWalk会导致CoM中外侧功能的增加,因为锁定的膝关节需要髋关节绕行才能向前摆动设备。本研究的结果可以帮助阐明每种装置对不同生物力学参数的定量影响。这些知识对于临床医生来说是有价值的,可以根据每个患者的个体情况开出最合适的设备,以改善他们在康复期间的功能,并最大限度地减少与设备相关的不良反应的风险。这方面的知识在需要长时间卸载踝关节和足部的情况下尤为重要,因为累积的影响会变得更加明显。此外,从本研究中获得的见解可以为克服现有设备局限性的改进设备的设计提供信息。
方法:20名健康受试者在无辅助的健全步态下,采用前臂拐杖、iWalk膝拐杖和ZeroG AFO三种卸载装置,以自行选择的速度行走。综合测量,包括运动捕捉,力板和代谢系统,用于评估各种时空,运动学,动力学和代谢参数。此外,参与者通过问卷提供主观反馈。使用重复测量方差分析的受试者交叉研究设计对这些条件进行比较。
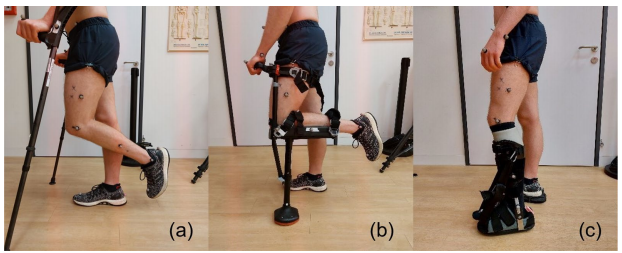
图1 本研究中检测的踝足卸载装置:前臂拐杖(CR), iWalk 2.0 (IW),零重力踝足矫形器(ZG)。所有的装置都是这样使用的,只有一只脚承重,另一只脚完全无负重
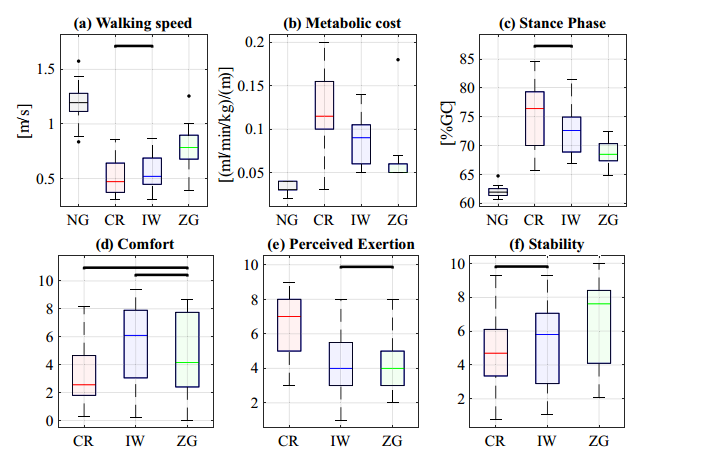
所检查的标量参数的汇总统计信息。黑色水平线表示配对条件之间无显著差异。a 6MWT时的步行速度,b代谢成本,c第二次步行试验时的站立阶段持续时间,d舒适度,e感觉劳累,f稳定性
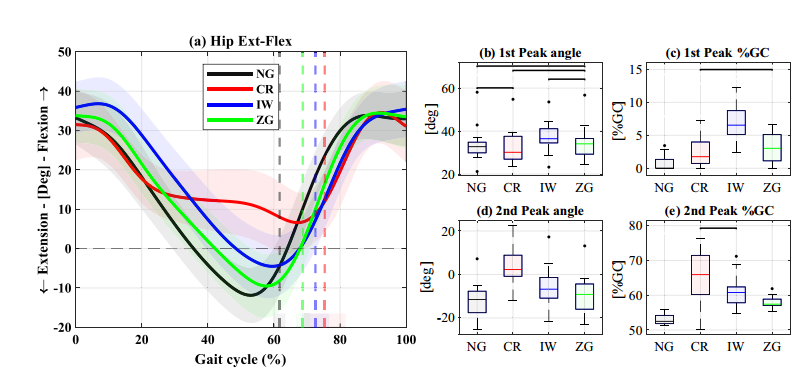
髋的矢状面角度承重腿。髋关节屈伸角度大于GC。实线表示中位数,阴影区域表示所有gc的范围,虚线表示TO事件的平均值。b - e髋部屈伸角第1峰b和时间c、髋部伸角第2峰d和时间e的汇总统计,黑色水平线表示差异无统计学意义
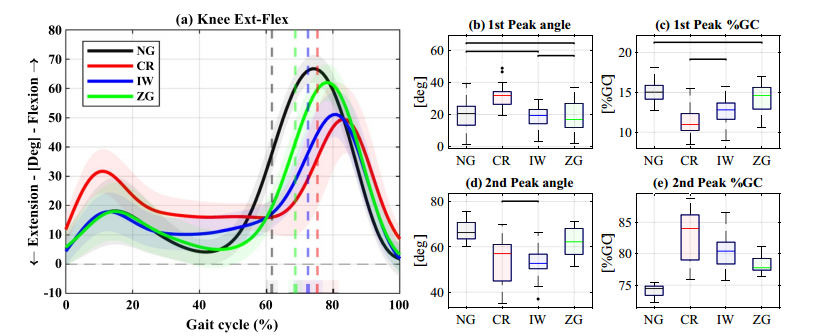
负重腿的膝关节矢状面角度。膝关节屈伸角度大于GC。实线表示中位数,阴影区域表示所有gc的范围,虚线表示TO事件的平均值。b - e第一次膝关节屈曲峰(b)及其时间(c)和第二次膝关节屈曲峰(d)及其时间(e)的汇总统计。黑色水平线表示无显著差异
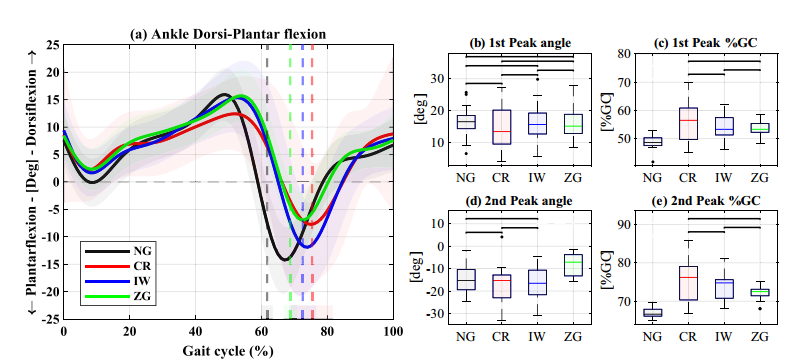
负重腿的矢状面踝关节角度。a踝关节背屈-跖屈角度大于GC。实线表示中位数,阴影区域表示所有gc的范围,虚线表示TO事件的平均值。b - e第1踝关节背伸峰(b)及其时间(c)和第2踝关节跖伸峰(d)及其时间(e)的汇总统计。黑色水平线表示差异无统计学意义
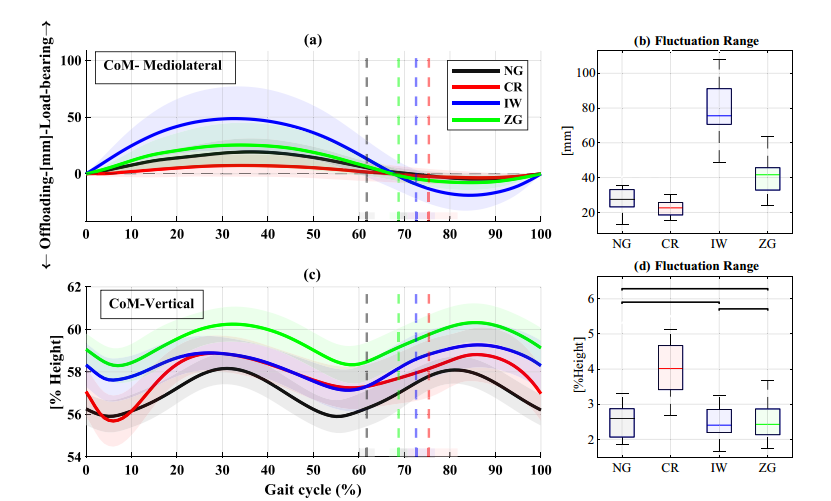
CoM的中外侧和垂直部分。a GC上的中外侧CoM轨迹,正值表示承重腿的方向。b中外侧关节关节功能范围的汇总统计。c在CG上的垂直CoM轨迹,由参与者的高度标准化。d垂直CoM函数范围的汇总统计。在a和c中,实线表示每种情况的中位数,阴影域表示所有周期的范围,虚线表示TO事件的平均值。在b和d中,黑色水平线表示差异不显著

GRF的垂直和前后(AP)分量按体重(BW)归一化。a在姿态阶段的垂直和AP轨迹。实线表示中位数,阴影区域表示所有周期的范围。b - i GRF各峰的汇总统计:b垂直GRF第1峰,c垂直GRF第1峰时间,d垂直GRF第2峰时间,e垂直GRF第2峰时间,f AP GRF第1峰时间,g AP GRF第1峰时间,h AP GRF第2峰时间,i AP GRF第2峰时间。黑色水平线表示差异不显著
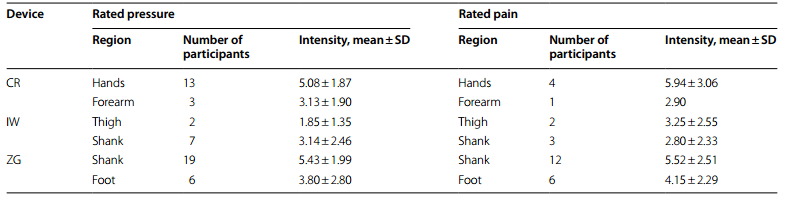
参与者对每个装置所指示的未负重腿的压力和疼痛位置的评级
结果:三种装置对健全人步态的影响有显著性差异。在这些设备中,ZeroG表现出明显更快的步行速度和更低的代谢成本。对于负重腿,ZeroG表现出最短的站立阶段,最低的制动力,髋关节和膝关节角度与正常步态最相似。然而,使用ZeroG推后踝关节跖外翻与正常步态差异最大。步行和拐杖分别造成了更大的重心、中外侧和垂直功能。参与者认为ZeroG是最稳定的,但更多的参与者抱怨它造成了过度的压力和疼痛。拐杖被评为最高的感知劳累和最低的舒适度,而ZeroG和iWalk在这些参数上没有发现显著差异。
结论:在所有测量中,这些设备之间存在显著差异,与之前对拐杖和iWalk的研究一致。ZeroG在大多数方面表现良好,突出了AFO在需要卸载时增强步态康复的潜力。然而,ZeroG的舒适性差和非典型的踝关节运动很明显。这些发现可以帮助临床医生在处方踝足卸压装置时做出明智的决定,并指导设计改进的装置,克服现有解决方案的局限性。
 J Neuroeng Rehabil:三种足踝辅助装置的生物力学比较分析
J Neuroeng Rehabil:三种足踝辅助装置的生物力学比较分析
本网站所有内容来源注明为“梅斯医学”或“MedSci原创”的文字、图片和音视频资料,版权均属于梅斯医学所有。非经授权,任何媒体、网站或个人不得转载,授权转载时须注明来源为“梅斯医学”。其它来源的文章系转载文章,或“梅斯号”自媒体发布的文章,仅系出于传递更多信息之目的,本站仅负责审核内容合规,其内容不代表本站立场,本站不负责内容的准确性和版权。如果存在侵权、或不希望被转载的媒体或个人可与我们联系,我们将立即进行删除处理。
在此留言












#生物力学# #足踝辅助装置#
6